Na seção " Professor, hoje tem aula de quê ??? " você encontrará artigos interessantes e material das aulas teóricas e práticas.
A seção de informações é dividida por matérias e temas dirigidos aos alunos de cursos técnicos de Eletroeletrônica, Aprendizagem Industrial na área de Eletricista de Manutenção e Engenharia Elétrica.
Hidráulica Aplicada: Anotações de Aulas de Hidráulica Aplicada ministradas aos alunos dos Cursos Técnico em Eletroeletrônica, Eletromecânica e Eletricista de Manutenção pelo Professor Sinésio Raimundo Gomes estão disponíveis nos links abaixo:
Lista e Exercícios de Hidráulica Aplicada a serem resolvidos em aula pelos alunos do Professor Sinésio Raimundo Gomes está disponível nos link:
Eletro-hidráulica Aplicada. Exercícios de Hidráulica Aplicada resolvidos pelo Professor Sinésio Raimundo Gomes estão disponíveis nos links abaixo:
- Diagrama 01 - 17_02_01 Exercício 01 - Válvula Limitadora de Pressão;
- Diagrama 02: 17_02_02 Exercício 02 - Guincho hidráulico;
- Diagrama 03: 17_01_03 Exercício 03 - Porta de Caldeira ;
- Diagrama 04: 20_01_04 Exercício 04 - Máquina de dobrar chapas;
- Diagrama 06: 17_02_06 Exercício 06 - Silo Descarregador para Veículos;
- Diagrama 07: 17_02_07 Exercício 07 - Morsa Hidráulica ;
- Diagrama 08: 17_02_08 Exercício 08: Forno de Tratamento Térmico ;
- Diagrama 09: 17_02_09 Exercício 09 - Plataforma Elevatória de Cargas ;
- Diagrama 10: 17_02_10 Exercício 10 - Guindaste de 3 eixos ;
Lista e Exercícios de Eletro-hidráulica Aplicada a serem resolvidos em aula pelos alunos do Professor Sinésio Raimundo Gomes está disponível nos link:
- Lista e Exercícios de Eletro-Hidráulica Aplicada está disponível nos link: 17_02_002 Exercícios de Eletro-Hidráulica .
Exercícios de Eletro-hidráulica Aplicada resolvidos pelo Professor Sinésio Raimundo Gomes estão disponíveis nos links abaixo:
- Diagrama 04: Exercício 04 - Morsa Eletro-hidráulica ;
- Diagrama 07: Exercício 07 - Prende e Fura Peças Eletro-hidráulico .
Pneumática Aplicada. Anotações de Aulas de Pneumática Aplicada ministradas aos alunos dos Cursos Técnico em Eletroeletrônica, Eletromecânica e Eletricista de Manutenção pelo Professor Sinésio Raimundo Gomes estão disponíveis nos links abaixo:
Lista e Exercícios de Pneumática Aplicada a serem resolvidos em aula pelos alunos do Professor Sinésio Raimundo Gomes está disponível nos link:
Exercícios de Pneumática Aplicada resolvidos pelo Professor Sinésio Raimundo Gomes estão disponíveis nos links abaixo:
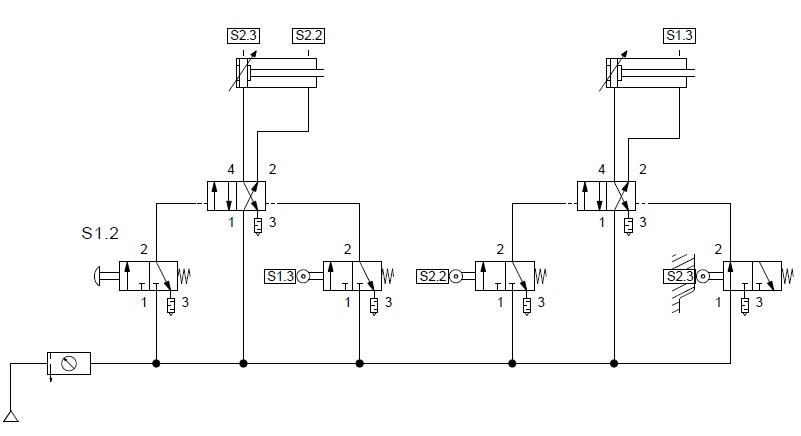
- Diagrama pneumático 01 : EX01 Alimenta Peças - Direto Coincidente ;
- Diagrama pneumático 02 : EX02 - Abertura de Caldeira - Direto Negado ;
- Diagrama pneumático 03 : EX03 Alimentação de Peças - Indireto ;
- Diagrama pneumático 04 : EX04 Dobra Chapas - Avanço e Recuo ;
- Diagrama pneumático 05 : EX05 Controle de Qualidade - Alternado ;
- Diagrama pneumático 06 : EX06 - Cortar Chapas - Bimanual ;
- Diagrama pneumático 07: EX07 - Silo Pneumático Temporizado ;
- Diagrama pneumático 08 : EX 08 - Cortar Chapas com avanço e recuo;
- Diagrama pneumático 09 : EX09 - Prende Fura Automático ;
- Diagrama pneumático 10 : EX10 - Dispositivo de Transferência de Peças;
- Diagrama pneumático 11: EX11 - Desloca e Prensa Peças Pneumático .
- Diagrama pneumático 12: EX12 - Prende e Fura Escamoteável .
Anotações de Aulas de Eletropneumática Aplicada ministradas aos alunos dos Cursos Técnico em Eletroeletrônica, Eletromecânica e e Eletricista de Manutenção pelo Professor Sinésio Raimundo Gomes estão disponíveis nos links abaixo:
Lista e Exercícios de Eletro Pneumática Aplicada a serem resolvidos em aula pelos alunos do Professor Sinésio Raimundo Gomes está disponível nos link:
Exercícios de Eletropneumática Aplicada resolvidos pelo Professor Sinésio Raimundo Gomes estará disponível em links que serão colocados abaixo:
Simbologia de componentes eletro-hidráulicos e eletropneumáticos disponível em: 23_11_01 Símbolos Eletro-hidráulicos e Eletropneumáticos.
Softwares de Eletro-hidráulica e Eletropneumática Aplicada
O software para simulação de circuitos de Eletro-hidráulica Aplicada está disponível no link: FESTO_HIDRAULIC_Sim.zip .
O software para simulação de circuitos de Eletropneumática Aplicada está disponível no link: FESTO_PNEUMATIC_Sim.zip .
O software para simulação de circuitos de Eletropneumática e Eletro-hidráulica Aplicada está disponível no link: AUTOMATION STUDIO - VERSÃO DEMO 305.zip
© Direitos de autor. 2017: Gomes; Sinésio Raimundo. Última atualização: 29/02/2020
















.jpg)